





-
 QQ空间
QQ空间
-
 QQ好友
QQ好友
-
 微信好友
微信好友
-
 新浪微博
新浪微博
万向接头
历史
主要概念来自于陀螺仪,由于第一个 万向接头 由罗伯特·胡克制造,因此又称做 胡克接头 。其实意大利数学家卡尔达诺(Gerolamo Cardano)在此前 一世纪的1545年就已提出了万向接头的想法,但是他是否制造出来实际模型却没有记载。在欧洲,人们也管这一装置叫做卡丹接头(Cardan joint)或者卡丹杆(Cardan shaft)。瑞典人 克里斯托弗·普尔海姆 ( 英语 : Christopher_Polhem ) 后来重新发明了这种装置,因此在瑞典语中成为它被称为“普尔海姆结”(Polhemsknot)。
运作方式
万向接头变化图
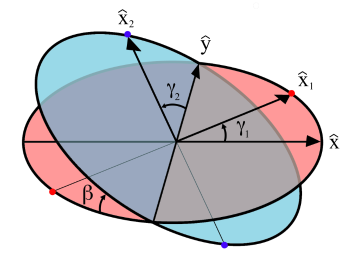
万向接头的主要问题-即使在驱动轴的旋转轴以恒定的速度转动,从动轴在旋转轴变速,造成振动、磨损和速度上的差异,主动轴的速度变化取决于连接的配置,可指定的三个变量:
γ γ --> 1 {\displaystyle \gamma _{1}} :轴1的旋转角度
γ γ --> 2 {\displaystyle \gamma _{2}} :轴2的旋转角度
β β --> {\displaystyle \beta } :两联接轴的偏离角度,若两轴为直线连接,则此角度为0
这些变量在右侧的图中说明。还示出了具有单位矢量的一组固定坐标轴 x ^ ^ --> {\displaystyle {\hat {\mathbf {x} }}} and y ^ ^ --> {\displaystyle {\hat {\mathbf {y} }}} 和每个轴的旋转平面。这些旋转平面垂直于旋转轴线,并且不随轴线旋转而移动。两个轴由未示出的万向节连接。然而,轴1在图中的红色旋转平面上的红点处附接到万向节,并且轴2附接在蓝色平面上的蓝点处。相对于旋转轴固定的坐标系被定义为具有其x轴单位向量 ( x ^ ^ --> 1 {\displaystyle {\hat {\mathbf {x} }}_{1}} and x ^ ^ --> 2 {\displaystyle {\hat {\mathbf {x} }}_{2}} )从原点指向一个连接点。 如图所示, x ^ ^ --> 1 {\displaystyle {\hat {\mathbf {x} }}_{1}} 是成角度的 γ γ --> 1 {\displaystyle \gamma _{1}} 相对于其沿着“x”轴的起始位置和 x ^ ^ --> 2 {\displaystyle {\hat {\mathbf {x} }}_{2}} 是成角度的 γ γ --> 2 {\displaystyle \gamma _{2}} 相对于沿着“y”轴的其起始位置。
x ^ ^ --> 1 {\displaystyle {\hat {\mathbf {x} }}_{1}} 被限制在图中的“红色平面”并与之相关 γ γ --> 1 {\displaystyle \gamma _{1}}
x ^ ^ --> 2 {\displaystyle {\hat {\mathbf {x} }}_{2}} 被限制在图中的“蓝色平面”,并且是在“x”轴上的单位向量的结果 x ^ ^ --> = [ 1 , 0 , 0 ] {\displaystyle {\hat {x}}=[1,0,0]} 通过欧拉角旋转 [ π π --> / 2 , β β --> , 0 {\displaystyle [\pi \!/2\,,\,\beta \,,\,0} ]:
双万向轴
相关
自动倾斜器
传动轴
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。

相关资料
展开

- 有价值
- 一般般
- 没价值








24小时热门






推荐阅读

关于我们

APP下载



{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}