





-
 QQ空间
QQ空间
-
 QQ好友
QQ好友
-
 微信好友
微信好友
-
 新浪微博
新浪微博
刚体
运动学
位置与取向
刚体是由一群数量超多的质点组成。实际而言,不可能精确地追踪其中每一个质点的运动。为了简化运算,可以利用刚体的“刚性”,即其内部所有质点彼此之间距离不变的性质。假若物体具有刚性,则倚靠设定三个不同线质点的位置,就足以设定此物体的位置。这意味着,在三维空间里,刚体至多只有九个自由度,但由于假定三个质点之间的距离固定不变,所以,刚体只有六个自由度。假设还有其它约束,例如,刚体的运动必需绕着其内部一点旋转(定点转动),或绕着其内部一直轴旋转(定轴转动),则自由度会小于六。
关于其它任意质点P的位置,只要知道质点P对于上述三个质点之中的任意一个质点的相对位置,就可以重建这质点的位置。通常,整个刚体的空间位形可以简易地以参数设定:
刚体的“位置”:挑选刚体内部一点G来代表整个刚体,通常会设定物体的质心或形心为这一点。从空间参考系S观测,点G的位置就是整个刚体在空间的位置。位置可以应用矢量的概念来表示:矢量的起点为参考系S的原点,终点为点G。设定刚体的位置需要三个坐标,例如,采用直角坐标系,这三个坐标为x-坐标、y-坐标、z-坐标。这用掉了三个自由度。
刚体的取向:描述刚体取向的方法有好几种,包括方向余弦、欧拉角、四元数等等。这些方法设定一个附体参考系B的取向(相对于空间参考系S)。附体参考系是固定于刚体的参考系。相对于刚体,附体参考系的取向固定不变。由于刚体可能会呈加速度运动,所以附体参考系可能不是惯性参考系。空间参考系是某设定惯性参考系,例如,在观测飞机的飞行运动时,附着于飞机场控制塔的参考系可以设定为空间参考系,而附着于飞机的参考系则可设定为附体参考系。刚体的取向需要用到另外三个自由度。
方向余弦

单位矢量 e i ^ ^ --> {\displaystyle {\hat {\mathbf {e} _{i}}}} 与参考系的三个单位矢量 x ^ ^ --> 1 {\displaystyle {\hat {\mathbf {x} }}_{1}} 、 x ^ ^ --> 2 {\displaystyle {\hat {\mathbf {x} }}_{2}} 、 x ^ ^ --> 3 {\displaystyle {\hat {\mathbf {x} }}_{3}} 之间的夹角分别为 θ θ --> i 1 {\displaystyle \theta _{i1}} 、 θ θ --> i 2 {\displaystyle \theta _{i2}} 、 θ θ --> i 3 {\displaystyle \theta _{i3}} 。
方向余弦方法可以用来设定附体参考系B的取向,即刚体的取向。假设沿着参考系S的坐标轴的三个单位矢量分别为 x ^ ^ --> 1 {\displaystyle {\hat {\mathbf {x} }}_{1}} 、 x ^ ^ --> 2 {\displaystyle {\hat {\mathbf {x} }}_{2}} 、 x ^ ^ --> 3 {\displaystyle {\hat {\mathbf {x} }}_{3}} ,沿着参考系B的坐标轴的三个单位矢量分别为 e ^ ^ --> 1 {\displaystyle {\hat {\mathbf {e} }}_{1}} 、 e ^ ^ --> 2 {\displaystyle {\hat {\mathbf {e} }}_{2}} 、 e ^ ^ --> 3 {\displaystyle {\hat {\mathbf {e} }}_{3}} 。定义 e ^ ^ --> i {\displaystyle {\hat {\mathbf {e} }}_{i}} 与 x ^ ^ --> j {\displaystyle {\hat {\mathbf {x} }}_{j}} 之间的方向余弦 a i j {\displaystyle a_{ij}} 为
其中, θ θ --> i j {\displaystyle \theta _{ij}} 是 e ^ ^ --> i {\displaystyle {\hat {\mathbf {e} }}_{i}} 与 x ^ ^ --> j {\displaystyle {\hat {\mathbf {x} }}_{j}} 之间的夹角。
e ^ ^ --> 1 {\displaystyle {\hat {\mathbf {e} }}_{1}} 、 e ^ ^ --> 2 {\displaystyle {\hat {\mathbf {e} }}_{2}} 、 e ^ ^ --> 3 {\displaystyle {\hat {\mathbf {e} }}_{3}} 与 x ^ ^ --> 1 {\displaystyle {\hat {\mathbf {x} }}_{1}} 、 x ^ ^ --> 2 {\displaystyle {\hat {\mathbf {x} }}_{2}} 、 x ^ ^ --> 3 {\displaystyle {\hat {\mathbf {x} }}_{3}} 之间的关系分别为
两个参考系的坐标轴所形成的矩阵称为“方向余弦矩阵” A {\displaystyle A} :
采用爱因斯坦求和约定,由于 e ^ ^ --> i = a i j x ^ ^ --> j {\displaystyle {\hat {\mathbf {e} }}_{i}=a_{ij}{\hat {\mathbf {x} }}_{j}} ,给定方向余弦矩阵 A {\displaystyle A} ,则可设定附体参考系B的取向,也就是刚体的取向。
反过来,经过一番运算,可以得到 x ^ ^ --> j = a i j e ^ ^ --> i {\displaystyle {\hat {\mathbf {x} }}_{j}=a_{ij}{\hat {\mathbf {e} }}_{i}} 。
给定位置矢量 r {\displaystyle \mathbf {r} }
则 r {\displaystyle \mathbf {r} } 与 e ^ ^ --> i {\displaystyle {\hat {\mathbf {e} }}_{i}} 的内积为
方向余弦矩阵 A {\displaystyle A} 可以将从空间参考系S观测的位置坐标 ( x 1 , x 2 , x 3 ) {\displaystyle (x_{1},x_{2},x_{3})} ,变换为从附体参考系B观测的位置坐标 ( e 1 , e 2 , e 3 ) {\displaystyle (e_{1},e_{2},e_{3})} ,因此又称为“变换矩阵”。
变换矩阵 A {\displaystyle A} 也可以做反变换如下:
变换矩阵 A {\displaystyle A} 是一种正交矩阵,满足“正交条件”
其中, δ δ --> j k {\displaystyle \delta _{jk}} 是克罗内克函数。
注意到 θ θ --> i j {\displaystyle \theta _{ij}} 与 θ θ --> j i {\displaystyle \theta _{ji}} 不同,夹角 θ θ --> j i {\displaystyle \theta _{ji}} 是 e ^ ^ --> j {\displaystyle {\hat {\mathbf {e} }}_{j}} 与空间参考系S的坐标轴单位矢量 x ^ ^ --> i {\displaystyle {\hat {\mathbf {x} }}_{i}} 之间的夹角。变换矩阵 A {\displaystyle A} 通常不是对称矩阵。
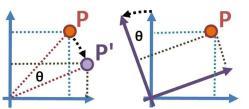
左图显示“主动变换”:参考轴固定不动,点P被旋转 − − --> θ θ --> {\displaystyle -\theta } 角弧成为点P"。右图显示“被动变换”:参考轴被旋转 θ θ --> {\displaystyle \theta } 角弧,而点P固定不动。
对于二维旋转,变换矩阵 A {\displaystyle A} 可以视为旋转矩阵。例如,将附体参考系B或刚体旋转,从 e ^ ^ --> 1 {\displaystyle {\hat {\mathbf {e} }}_{1}} 、 e ^ ^ --> 2 {\displaystyle {\hat {\mathbf {e} }}_{2}} 、 e ^ ^ --> 3 {\displaystyle {\hat {\mathbf {e} }}_{3}} 旋转 θ θ --> {\displaystyle \theta } 角弧成为 e ^ ^ --> 1 ′ {\displaystyle {\hat {\mathbf {e} }}"_{1}} 、 e ^ ^ --> 2 ′ {\displaystyle {\hat {\mathbf {e} }}"_{2}} 、 e ^ ^ --> 3 ′ {\displaystyle {\hat {\mathbf {e} }}"_{3}} ;其中, e ^ ^ --> 3 = e ^ ^ --> 3 ′ {\displaystyle {\hat {\mathbf {e} }}_{3}={\hat {\mathbf {e} }}"_{3}} 。对于这旋转,旋转矩阵 A {\displaystyle A} 为
参考轴 e ^ ^ --> i ′ {\displaystyle {\hat {\mathbf {e} }}"_{i}} 与 e ^ ^ --> j {\displaystyle {\hat {\mathbf {e} }}_{j}} 之间的关系为
旋转矩阵 A {\displaystyle A} 也可以视为将点P的位置矢量 r = x i x ^ ^ --> i {\displaystyle \mathbf {r} =x_{i}{\hat {\mathbf {x} }}_{i}} 旋转 − − --> θ θ --> {\displaystyle -\theta } 角弧成为点P"的位置矢量 r ′ = x i ′ x ^ ^ --> i {\displaystyle \mathbf {r} "=x"_{i}{\hat {\mathbf {x} }}_{i}} :
欧拉角
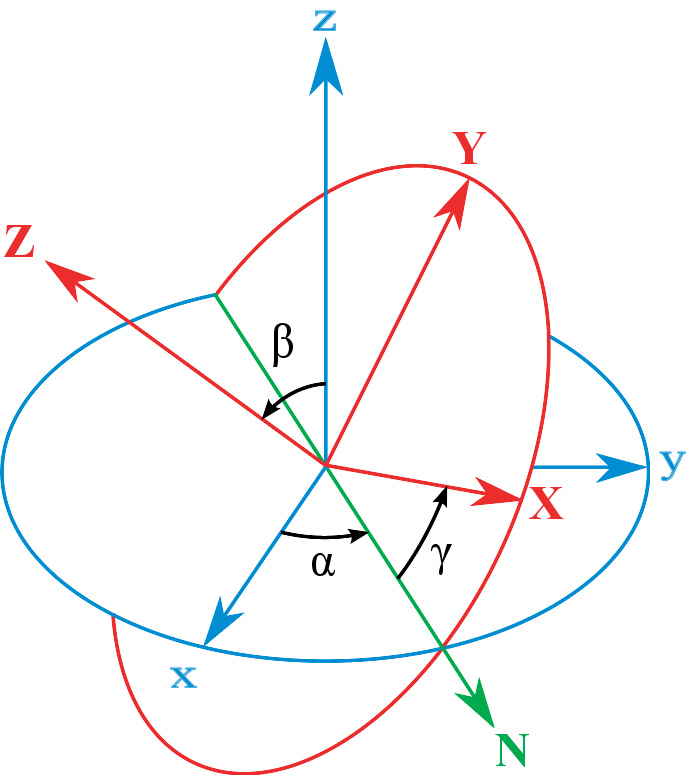
按照顺序使用最多三个欧拉角 ( α α --> , β β --> , γ γ --> {\displaystyle \alpha ,\ \beta ,\ \gamma } ),可以从xyz-轴变换到XYZ-轴。交点线(N)是以绿色表示。
方向余弦矩阵 A {\displaystyle A} 足以设定附体参考系B的取向。但是,矩阵 A {\displaystyle A} 有九个元素,而刚体只能供给三个自由度来设定取向,因为这九个元素不是 自变量 。欧拉角的三个自变量可以用来设定刚体的取向。
相对于空间参考系S,附体参考系B的取向,可以用三个欧拉角来设定。参阅右图。设定xyz-轴为空间参考系S的坐标轴,XYZ-轴为附体参考系B的坐标轴。称xy-平面与XY-平面的相交为“交点线”,用英文字母(N)代表。按照“zxz顺规”,欧拉角可以这样定义:
α α --> {\displaystyle \alpha } 是x-轴与交点线(N)之间的夹角,
β β --> {\displaystyle \beta } 是z-轴与Z-轴之间的夹角,
γ γ --> {\displaystyle \gamma } 是交点线(N)与X-轴之间的夹角。
每一个欧拉角的旋转都对应于一个简单的旋转矩阵:
设定刚体取向的旋转矩阵 A {\displaystyle A} 是由三个简单旋转矩阵 A α α --> {\displaystyle A_{\alpha }} 、 A β β --> {\displaystyle A_{\beta }} 、 A γ γ --> {\displaystyle A_{\gamma }} 共同合成:
单独分开工作,每个矩阵各自代表一种旋转。按照顺序相乘,
最里面的(最右的)矩阵代表绕着z轴的旋转。
最外面的(最左的)矩阵代表绕着Z轴的旋转。
在中间的矩阵代表绕着交点线的旋转。
经过一番运算,可以得到 A {\displaystyle A} 矩阵:
A {\displaystyle A} 的逆矩阵是:
欧拉旋转定律
欧拉旋转定理表明,在三维空间里,假设约束刚体内部一点固定不动,则其任意位移等价于绕着某固定轴的一个旋转,而这固定轴必包含这固定点。换句话说,设定附体参考系B的原点为这固定点,则附体参考系B不会因为这位移而涉及任何平移运动,再设定附体参考系B的z-轴与固定轴同轴,则这位移对应于绕着附体参考系B的z-轴旋转 γ γ --> {\displaystyle \gamma } 角弧,而z-轴的方向是由 α α --> {\displaystyle \alpha } 与 β β --> {\displaystyle \beta } 角弧给出。
对于内部有一点被约束固定不动的刚体(或原点固定不动的参考系),欧拉旋转定理将其任意位移等价为绕着某固定轴的一个旋转。这允许使用旋转来表达取向的改变。因此,变换矩阵 A {\displaystyle A} 可以视为三维旋转的旋转矩阵,将附体参考系B或刚体做任意环绕着固定点的旋转,从 e ^ ^ --> 1 {\displaystyle {\hat {\mathbf {e} }}_{1}} 、 e ^ ^ --> 2 {\displaystyle {\hat {\mathbf {e} }}_{2}} 、 e ^ ^ --> 3 {\displaystyle {\hat {\mathbf {e} }}_{3}} 旋转成为 e ^ ^ --> 1 ′ {\displaystyle {\hat {\mathbf {e} }}"_{1}} 、 e ^ ^ --> 2 ′ {\displaystyle {\hat {\mathbf {e} }}"_{2}} 、 e ^ ^ --> 3 ′ {\displaystyle {\hat {\mathbf {e} }}"_{3}} 。参考轴 e ^ ^ --> i ′ {\displaystyle {\hat {\mathbf {e} }}"_{i}} 与 e ^ ^ --> j {\displaystyle {\hat {\mathbf {e} }}_{j}} 之间的关系为
沙勒定理

挂在引力式摩天轮边缘的乘客座舱在做平移运动。

刚体平移运动示意图。
当刚体移动时,它的位置与取向都可能会随着时间演进而改变。 沙勒定理 是欧拉旋转定律的一个推论。根据沙勒定理,刚体的最广义位移等价于一个平移加上一个旋转。 因此,刚体运动可分为平移运动与旋转运动。刚体的现在位置与现在取向可以视为是从某个初始位置与初始取向经过平移与旋转而成。
如右图所示,从时间 t 1 {\displaystyle t_{1}} 到时间 t 2 {\displaystyle t_{2}} ,当刚体在做平移运动时,任意内部两点,点P与点Q的轨迹(以黑色实线表示)相互平行,线段 P Q ¯ ¯ --> {\displaystyle {\overline {PQ}}} (以黑色虚线表示)的方向保持恒定。
挑选刚体内部一点G来代表整个刚体,设定附体参考系B的原点于点G(称为“基点”),则从空间参考系S观测,在刚体内部任意一点P的位置 r P {\displaystyle \mathbf {r} _{P}} 为
其中, r G {\displaystyle \mathbf {r} _{G}} 、 r P / G {\displaystyle \mathbf {r} _{P/G}} 分别是基点G的位置、点P对于基点G的相对位置。
从附体参考系B观测,刚体内部每一点的位置都固定不变,但从空间参考系S观测,刚体从时间 t 1 {\displaystyle t_{1}} 到时间 t 2 {\displaystyle t_{2}} 的运动,可以分为基点G从 r G ( t 1 ) {\displaystyle \mathbf {r} _{G}(t_{1})} 到 r G ( t 2 ) {\displaystyle \mathbf {r} _{G}(t_{2})} 的平移运动,与位移 r P / G {\displaystyle \mathbf {r} _{P/G}} 从时间 t 1 {\displaystyle t_{1}} 到时间 t 2 {\displaystyle t_{2}} 的旋转运动。
平移速度与角速度
从不同的参考系观测刚体运动,可能会获得不同的平移速度和不同的角速度。为了确保测量结果具有实际物理意义,必需先给定参考系。
刚体的平移速度是矢量,是其位置矢量的时间变化率,是附着于刚体的基点G的速度。对于纯平移运动(没有任何旋转运动),刚体内部所有点的移动速度相同。假设涉及旋转运动,则通常刚体内部任意两点的瞬时速度不相等;只有当它们恰巧处于同一直轴,而这直轴平行于 转动瞬轴 ,则它们的瞬时速度相等。
角速度也是矢量,描述刚体取向改变的角速率,和刚体旋转时的瞬时转轴的方向(欧拉旋转定理保证瞬时转轴的存在)。在任意时间,刚体内部每一个质点的角速度相同。
矢量的时间变化率
假设一刚体呈纯旋转运动,其附体参考系B也会跟着旋转,因此,对于任意矢量 F {\displaystyle \mathbf {F} } ,从这附体参考系B与从空间参考系S观测,会得到不同的结果。假设附体参考系B ( e ^ ^ --> 1 , e ^ ^ --> 2 , e ^ ^ --> 3 ) {\displaystyle ({\hat {\mathbf {e} }}_{1},{\hat {\mathbf {e} }}_{2},{\hat {\mathbf {e} }}_{3})} 与空间参考系S ( x ^ ^ --> 1 , x ^ ^ --> 2 , x ^ ^ --> 3 ) {\displaystyle ({\hat {\mathbf {x} }}_{1},{\hat {\mathbf {x} }}_{2},{\hat {\mathbf {x} }}_{3})} 同原点。对于这些参考系,三维含时矢量 F ( t ) {\displaystyle \mathbf {F} (t)} 分解为
F ( t ) {\displaystyle \mathbf {F} (t)} 对于时间的导数为
单独计算附体参考轴对于时间的导数:
其中, a ˙ ˙ --> i j = d e f d a i j d t {\displaystyle {\dot {a}}_{ij}\ {\stackrel {def}{=}}\ {\frac {\mathrm {d} a_{ij}}{\mathrm {d} t}}} 是方向余弦对于时间的导数。
由于 d e ^ ^ --> i d t {\displaystyle {\frac {\mathrm {d} {\hat {\mathbf {e} }}_{i}}{\mathrm {d} t}}} 垂直于 e ^ ^ --> i {\displaystyle {\hat {\mathbf {e} }}_{i}} , d e ^ ^ --> i d t {\displaystyle {\frac {\mathrm {d} {\hat {\mathbf {e} }}_{i}}{\mathrm {d} t}}} 只能是其他两个单位矢量的线性组合:
其中, ϵ ϵ --> i j ℓ ℓ --> {\displaystyle \epsilon _{ij\ell列维-奇维塔符号-奇维塔符号, ω ω --> i j {\displaystyle \omega _{ij}} 是系数。
对于任意 e ^ ^ --> m ≠ ≠ --> e ^ ^ --> i {\displaystyle {\hat {\mathbf {e} }}_{m}\neq {\hat {\mathbf {e} }}_{i}} , 单位矢量 e ^ ^ --> i {\displaystyle {\hat {\mathbf {e} }}_{i}} 与 e ^ ^ --> m {\displaystyle {\hat {\mathbf {e} }}_{m}} 的内积对于时间的导数为
所以, ω ω --> i j {\displaystyle \omega _{ij}} 的下标 i {\displaystyle i} 多余无用,可以删除,变为 ω ω --> j {\displaystyle \omega _{j}} :
思考 d F d t {\displaystyle {\frac {\mathrm {d} \mathbf {F} }{\mathrm {d} t}}} 方程最右边项目 F i d e ^ ^ --> i d t {\displaystyle F_{i}{\frac {\mathrm {d} {\hat {\mathbf {e} }}_{i}}{\mathrm {d} t}}} ,对换傀标 i {\displaystyle i} ℓ ℓ --> {\displaystyle \ell } ,可以得到
矢量 ω ω --> {\displaystyle {\boldsymbol {\omega }}} 是由三个系数 ω ω --> 1 {\displaystyle \omega _{1}} 、 ω ω --> 2 {\displaystyle \omega _{2}} 、 ω ω --> 3 {\displaystyle \omega _{3}} 组成,对应于附体参考系的三个参考轴 e ^ ^ --> 1 {\displaystyle {\hat {\mathbf {e} }}_{1}} 、 e ^ ^ --> 2 {\displaystyle {\hat {\mathbf {e} }}_{2}} 、 e ^ ^ --> 3 {\displaystyle {\hat {\mathbf {e} }}_{3}} ,系数数值可以从欧拉角计算求得:
试想对应于欧拉角 α α --> {\displaystyle \alpha } 、 β β --> {\displaystyle \beta } 、 γ γ --> {\displaystyle \gamma } 的三个旋转轴分别为 z ^ ^ --> {\displaystyle {\hat {\mathbf {z} }}} 、 N ^ ^ --> {\displaystyle {\hat {\mathbf {N} }}} 、 Z ^ ^ --> {\displaystyle {\hat {\mathbf {Z} }}} ,三个角速度分别为
这三个角速度的矢量和,对于附体参考系B的分量分别为
注意到附体参考系B的 e ^ ^ --> 1 {\displaystyle {\hat {\mathbf {e} }}_{1}} 、 e ^ ^ --> 2 {\displaystyle {\hat {\mathbf {e} }}_{2}} 、 e ^ ^ --> 3 {\displaystyle {\hat {\mathbf {e} }}_{3}} 就是欧拉角的 X ^ ^ --> {\displaystyle {\hat {\mathbf {X} }}} 、 Y ^ ^ --> {\displaystyle {\hat {\mathbf {Y} }}} 、 Z ^ ^ --> {\displaystyle {\hat {\mathbf {Z} }}} ,所以,矢量 ω ω --> {\displaystyle {\boldsymbol {\omega }}} 是附体参考系B旋转的角速度。
总结,矢量 F ( t ) {\displaystyle \mathbf {F} (t)} 对于时间的导数为
设定 ( d F d t ) s p a c e {\displaystyle \left({\frac {\mathrm {d} \mathbf {F} }{\mathrm {d} t}}\right)_{\mathrm {space} }} 、 ( d F d t ) b o d y {\displaystyle \left({\frac {\mathrm {d} \mathbf {F} }{\mathrm {d} t}}\right)_{\mathrm {body} }} 分别为从空间参考系S、附体参考系B观测到的矢量 F ( t ) {\displaystyle \mathbf {F} (t)} 对于时间的导数,上述方程可以表达为
项目 ω ω --> × × --> F {\displaystyle {\boldsymbol {\omega }}\times \mathbf {F} } 可以想像为,从空间参考系S观测,刚体内部位置矢量为 F {\displaystyle \mathbf {F} } 的质点,由于刚体旋转而产生的速度。
矢量 F ( t ) {\displaystyle \mathbf {F} (t)} 是任意矢量,因此可以将 ( d d t ) s p a c e {\displaystyle \left({\frac {\mathrm {d} }{\mathrm {d} t}}\right)_{\mathrm {space} }} 、 ( d d t ) b o d y {\displaystyle \left({\frac {\mathrm {d} }{\mathrm {d} t}}\right)_{\mathrm {body} }} 当作算符,这样,对应的算符方程的形式为:
这算符方程可以作用于任意含时矢量。
运动学方程
根据沙勒定理,刚体的最广义位移等价于一个平移加上一个旋转。 挑选刚体内部一点G来代表整个刚体,设定附体参考系B的原点于基点G,则从空间参考系S观测,在刚体内部任意一点P的位置 r P {\displaystyle \mathbf {r} _{P}} 为
其中, r G {\displaystyle \mathbf {r} _{G}} 、 r P / G {\displaystyle \mathbf {r} _{P/G}} 分别是基点G的位置、点P对于基点G的相对位置。
点P的速度 v P = ( d r P d t ) s p a c e {\displaystyle \mathbf {v} _{P}=\left({\frac {\mathrm {d} \mathbf {r} _{P}}{\mathrm {d} t}}\right)_{\mathrm {space} }} 为
其中, v G = ( d r G d t ) s p a c e {\displaystyle \mathbf {v} _{G}=\left({\frac {\mathrm {d} \mathbf {r} _{G}}{\mathrm {d} t}}\right)_{\mathrm {space} }} 、 v P / G = ( d r P / G d t ) s p a c e {\displaystyle \mathbf {v} _{P/G}=\left({\frac {\mathrm {d} \mathbf {r} _{P/G}}{\mathrm {d} t}}\right)_{\mathrm {space} }} 分别是基点G的速度、点P对于基点G的相对速度。
应用前段推导出的适用于任意含时矢量的算符方程,可以计算出 v P / G {\displaystyle \mathbf {v} _{P/G}} 。由于从附体参考系B观测,刚体内部每一点的位置都固定不变,项目 ( d r P / G d t ) b o d y {\displaystyle \left({\frac {\mathrm {d} \mathbf {r} _{P/G}}{\mathrm {d} t}}\right)_{\mathrm {body} }} 等于零:
其中, ω ω --> {\displaystyle {\boldsymbol {\omega }}} 是刚体的角速度矢量。
所以,点P的速度为
点P的加速度 a P = ( d v P d t ) s p a c e {\displaystyle \mathbf {a} _{P}=\left({\frac {\mathrm {d} \mathbf {v} _{P}}{\mathrm {d} t}}\right)_{\mathrm {space} }} 为
其中, a G = ( d v G d t ) s p a c e {\displaystyle \mathbf {a} _{G}=\left({\frac {\mathrm {d} \mathbf {v} _{G}}{\mathrm {d} t}}\right)_{\mathrm {space} }} 、 a P / G = ( d v P / G d t ) s p a c e {\displaystyle \mathbf {a} _{P/G}=\left({\frac {\mathrm {d} \mathbf {v} _{P/G}}{\mathrm {d} t}}\right)_{\mathrm {space} }} 分别是基点G的速度、点P对于基点G的相对速度。
再应用前段推导出的算符方程,可以计算出
其中, α α --> = ( d ω ω --> d t ) s p a c e {\displaystyle {\boldsymbol {\alpha }}=\left({\frac {\mathrm {d} {\boldsymbol {\omega }}}{\mathrm {d} t}}\right)_{\mathrm {space} }} 是附体参考系B旋转的角加速度矢量。
动力学
当描述刚体的动力运动时,必需先处理妥善刚体的平移运动,即先选择一个参考点来代表刚体与其附体参考系B。刚体内部任意一点都可以被选为参考点(附体参考系B的原点)。但是,根据实际应用需要,比较适当的选择为:
刚体的质心:对于自由移动于空间的刚体,以其质心为参考点的方法通常会给出最简单的运动。
平移运动为零或可以简易研算的点:例如,在轴或铰链上、在万向接头的中心等等。
当质心被选为参考点时:
刚体的动量与其旋转运动无关。在任何时间,动量等于刚体的总质量乘以平移速度。
不论刚体的平移运动为何,对于质心的角动量皆等同。所以,在计算角动量时,可以忽略平移运动。在任何时间,角动量等于惯性张量乘以角速度。假若知道刚体绕主轴的角速度,那么,角动量对于每一主轴的分量,是对应的主惯性矩乘以对应的角速度;力矩是转动惯量乘以角加速度。
在无外力作用下,可能形成的运动为等速直线运动、稳定 绕定轴转动 、零力矩进动等等。
作用于刚体的净外力,等于总质量乘以刚体平移运动的加速度(也就是说,不论净外力矩是否为零,或这刚体是否在作旋转运动,牛顿第二运动定律可以正确地应用于刚体平移运动,)。
总动能是平移动能与旋转动能的总和。
刚体的转动
刚体的转动定律: M = I α α --> {\displaystyle M=I\alpha } ,其中 M {\displaystyle M} 为刚体所受合外力的力矩, I {\displaystyle I} 为刚体转动惯量, α α --> {\displaystyle \alpha } 为刚体角加速度。
刚体的转动动能定理: W = ∫ ∫ --> θ θ --> 1 θ θ --> 2 M d θ θ --> = 1 2 I ω ω --> 2 2 − − --> 1 2 I ω ω --> 1 2 {\displaystyle W=\int _{\theta _{1}}^{\theta _{2}}M\,d\theta ={\frac {1}{2}}I\omega _{2}^{2}-{\frac {1}{2}}I\omega _{1}^{2}} ,其中 ∫ ∫ --> θ θ --> 1 θ θ --> 2 M d θ θ --> {\displaystyle \int _{\theta _{1}}^{\theta _{2}}M\,d\theta } 表示合外力的力矩 M {\displaystyle M} 在角位移 θ θ --> 2 − − --> θ θ --> 1 {\displaystyle \theta _{2}-\theta _{1}} 上所作的功, I {\displaystyle I} 为刚体的转动惯量, ω ω --> {\displaystyle \omega } 为刚体角速度。
刚体的转动和平动可以合成为刚体的平面运动,由柯尼希定理,其动能为 E k = 1 2 m V c 2 + 1 2 I ω ω --> 2 {\displaystyle E_{k}={\frac {1}{2}}mV_{c}^{2}+{\frac {1}{2}}I\omega ^{2}} ,其中 V c {\displaystyle V_{c}} 为刚体质心对参考系的速度。
参阅
无穷小旋转
欧拉运动方程
欧拉运动定律
刚体动力学
玻恩刚性
刚性转子
参考文献
J.L. Meriam, L.G. Kraige, "Engineering Mechanics: Dynamics,"第三版,ISBN 978-0-471-59273-0。
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。



- 有价值
- 一般般
- 没价值








24小时热门






推荐阅读

关于我们

APP下载



{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}